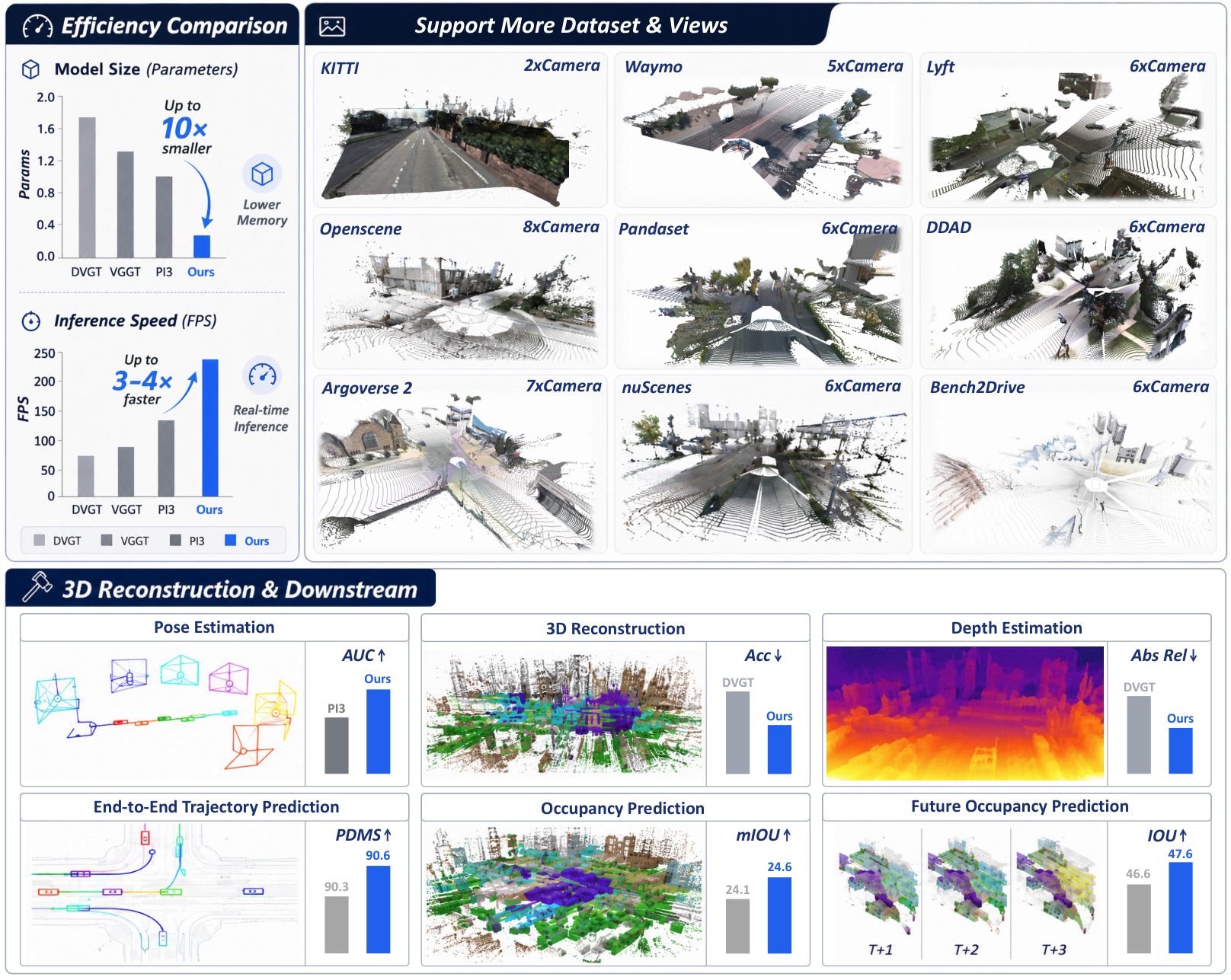
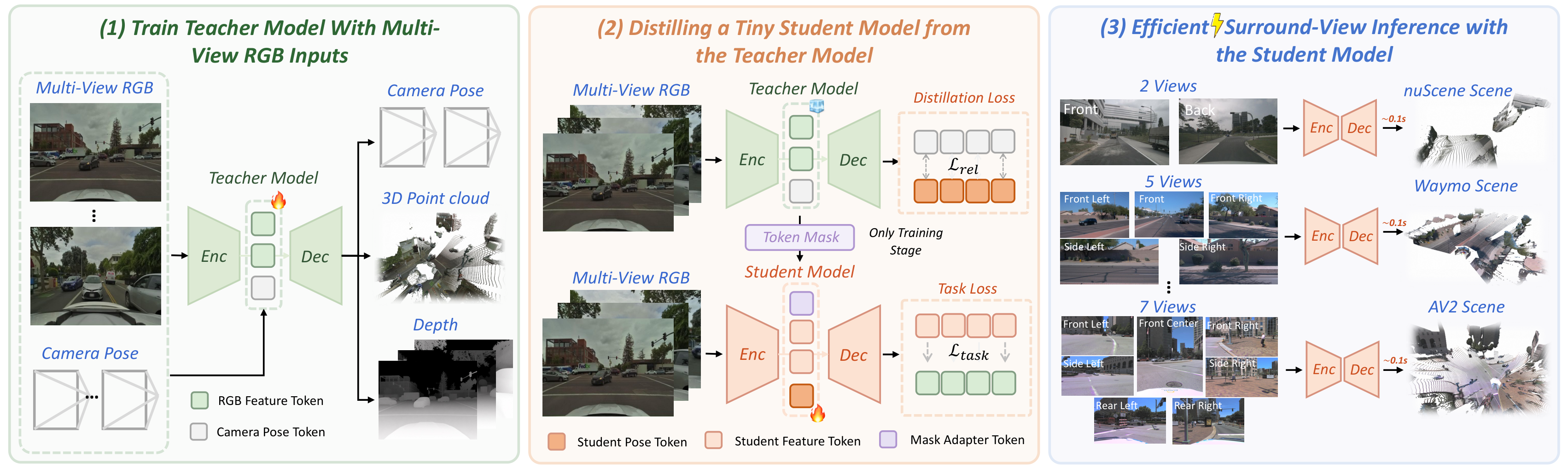
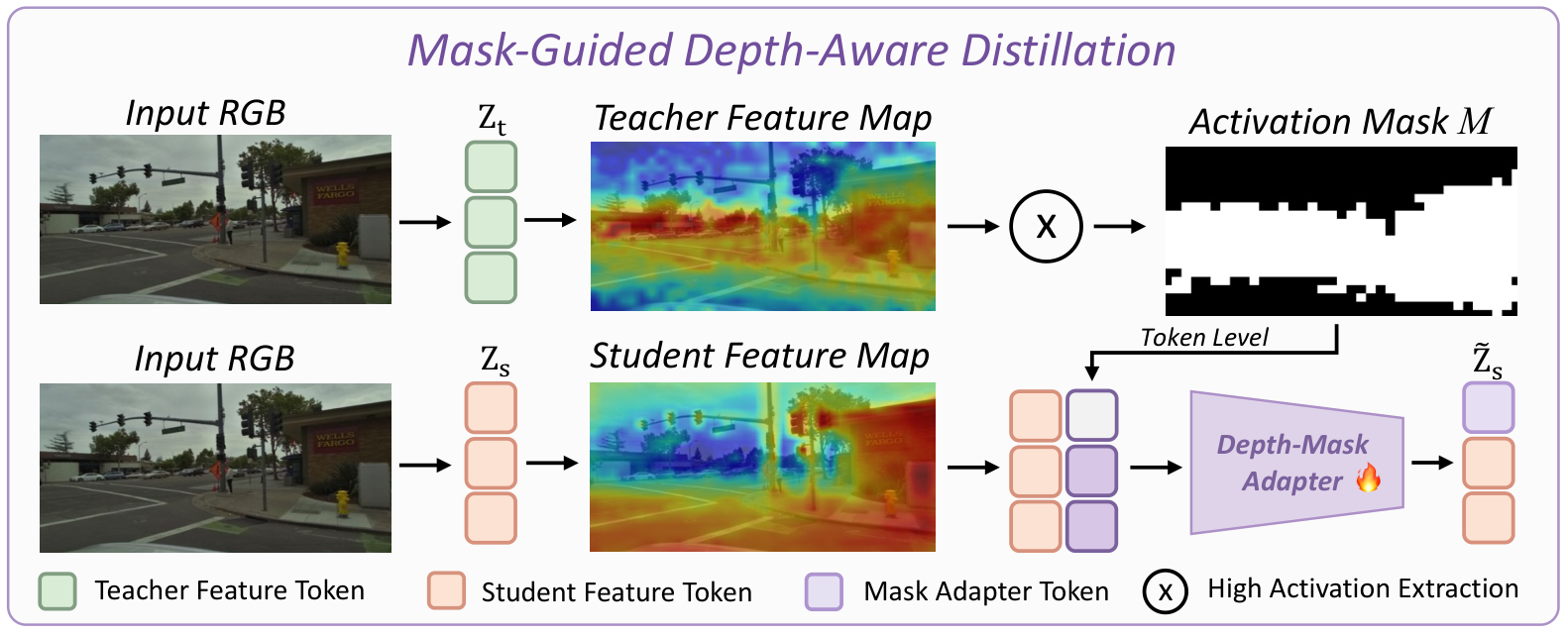
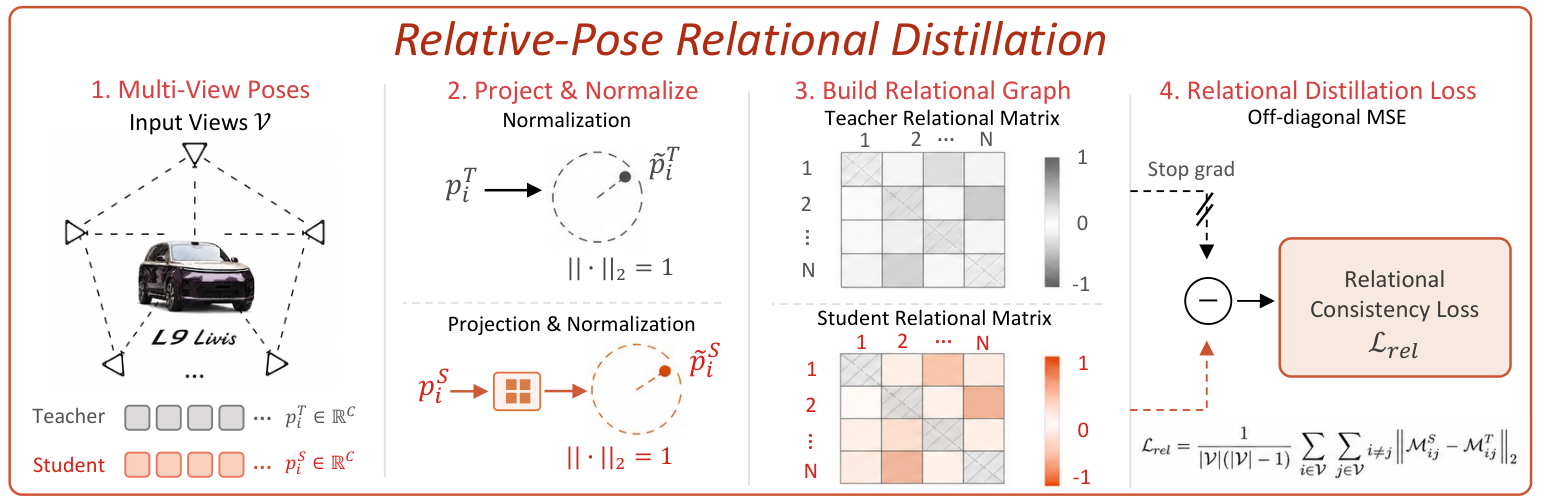
Dense 3D reconstruction has demonstrated immense potential for spatial understanding, yet its viability as a real-time, onboard representation for autonomous driving remains an open challenge. Existing large-scale visual geometry models typically require substantial computational resources and lack the long-range geometric fidelity, surround-view consistency, and real-time efficiency demanded by dynamic driving environments. To bridge this gap, we present LiAuto-GeoX, an efficient grounded driving transformer designed for deployable, ego-centric 3D scene understanding. Our approach begins by learning a high-capacity driving geometry model from large-scale surround-view data, utilizing sparse LiDAR priors to provide robust geometric grounding in distant, ambiguous, or structure-sparse regions. We then instantiate this capability into a highly compact 155M-parameter onboard model through a novel geometry-preserving distillation framework. This framework employs mask-guided depth-aware distillation to retain fine-grained metric structures by emphasizing geometrically informative regions, and relative-pose relational distillation to enforce cross-view spatial consistency through pose-induced geometric relations. Extensive evaluations reveal that LiAuto-GeoX runs at 220 FPS on KITTI while maintaining high-fidelity dense reconstruction, enabling real-time deployment. The learned geometry transfers seamlessly to downstream autonomy tasks, achieving 90.6 PDMS in trajectory prediction, 24.63 mIoU in occupancy prediction, and 47.67 IoU in future-frame prediction. These all demonstrate that efficient dense 3D reconstruction can transcend its traditional role as a perception target to serve as a scalable, foundational geometric representation for next-generation autonomous driving.











@article{lian2026geox,
author = {Lian, Jiawei and Sun, Haoyi and Wu, Yang and Mu, Lifu and Wang, Siyuan and Wei, Tao and Hui, Le and Mao, Ning and Zhou, Pan and Zhan, Kun and Yang, Jian},
title = {LiAuto-GeoX: Efficient Grounded Driving Transformer},
journal = {arXiv},
year = {2026},
}